


★★★注意:请将需求胶球性能参数、型号大小 、订单数量等相关要求可发邮箱:3369838020@qq.com,我们将给您优惠的价格。联系人:晏经理(15861293778)QQ:3369838020。实体厂家生产,大量现货,大量批发来电价格更优惠!
胶球清洗装置凝汽器结垢容易丢球毁球问题分析
胶球清洗装置凝汽器结垢容易丢球毁球问题分析。研制出一种能够自动检测胶球数量及其半径的自动监测装置。对顺序采集的胶球图像进行图像拼接,去除重复部分,然后采用灰度变换、图像平滑等一系列预处理算法去噪,去噪后结合基于小误差分割法的灰度图二值化变换对图像进行分割,得到目标明确的分割图像,后,利用二值图像投影变换,进行胶球位置定位,获得胶球的数量及磨损状况。多次试验结果表明,算法具有很好的实时性和有效性。该胶球清洗装置的成功研制填补了国内空白。
在发电过程中,凝汽器管壁会出现不同程度的污垢影响凝汽器换热,造成机组真空降低,增加发电煤耗。目前,大多数电厂对凝汽器的结垢主要是采用周期性高压清洗的办法进行处理,即胶球清洗装置。凝汽器胶球清洗装置是由收球网、胶球输送泵、装球室、控制器、胶球及阀门管路等部件组成的,如图1所示。它借助高压水流的作用将大于凝汽器冷却管内径的清洁胶球挤过冷却管,对冷却管进行反复擦洗,清洗凝汽器冷却管内污垢并带出杂质。从而可以实现延长冷却管使用寿命、提高发电厂经济效益、保障机组安全运行的目的。而胶球清洗装置系统清洁效果能否达到佳,依赖于胶球个数是否足量、胶球半径是否够大。总是存在这样或那样的原因导致清洗过程中胶球的堵塞,出现丢球现象,或者造成胶球磨损,这都直接影响了换热效果。
目前,国内电厂中大都采用定期人工检查的方法判断是否需要加球或换球,费时费力,误差较大。因此,为提高电厂的经济效益以及自动化水平,急需开发回收胶球自动监测系统。
图1监测系统安装位置示意图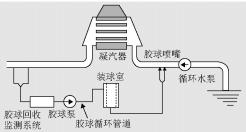
针对胶球清洗装置系统胶球回收率低、回收胶球数量检测困难等问题,研发了利用光纤传感器对通过胶球计数的胶球回收自动监测器,并开发了利用水流速度的变化检测管道内部清洗程度的胶球清洗效果监测器。胶球清洗装置系统进行了一系列的内部机械改造,研制出的新型胶球清洗装置系统胶球回收率基本上达到了99%,但其存在的问题就是无法自动检测胶球的磨损程度。两家公司的产品在我国都是按照整套胶球清洗装置系统售卖,购价昂贵。
开发一种无需更换原胶球清洗装置系统,可以直接附加在原设备上的胶球回收自动监测系统,如图1所示,它可以自动地监测回收胶球的数量及其半径,这样运行人员就可以根据检测结果适时地添加或更换胶球,保证胶球的数量以及质量,以期达到佳的清洗效果。
1胶球回收自动监测系统的硬件配置以及软件检测框图
图2监测系统硬件配置示意图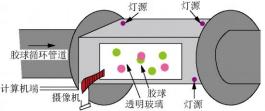
本文软件模块的任务就是从一周期的连续图像中自动检测出所有胶球的数量及磨损程度。其软件检测框图如图3所示。先通过工业摄像机采集胶球连续图像,并根据时间顺序存储,然后利用图像拼接算法去除每两幅连续图像之间的重复部分,再进行灰度变换、图像平滑等一系列预处理过程去噪,去噪后采用基于小误差分割法的灰度图二值化变换对图像进行分割,得到目标明确的分割图像,后,在此基础上,进行胶球位置定位,获得胶球的数量及磨损状况。
图3软件检测框图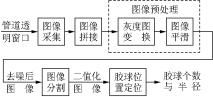
2图像拼接
要想记录水流循环一周期内的所有胶球数,必须对由水流带动胶球的所有流动画面进行图像采集,为保证图像的连贯性与完整性,硬件配置图像采集窗口为10cm×10cm,而利用软件将拍摄频率设为40Hz。这样虽然能够保障图像不会缺失,但同时造成了连续两幅图像之间搭界位置图像的重复。因此,必须先对每两幅连续图像进行图像拼接,将重复部分去掉。
寻找每两幅图像的佳拼接位置,本文采取的拼接方法是:对相邻的两幅图像而言,前一幅中心线的右面和后一幅中心线的左面是有重合部分的。在本文中,通过窗口大小以及频率的佳设置,使得重合部分大宽度仅为单幅图像的1/10,这极大地减少了拼接算法的匹配空间,同时也缩短了拼接时间。因此,匹配时只需在前一幅图像右边界1/10的空间中定义一个搜索模板(以一个像素为中心,宽和高自己定义),分别计算这个模板中所有像素点与后一幅图像中相对应的位置的像素点的RGB差的平方和,得到的小的那个值时的像素点的位置,即为佳匹配位置,将其记录下来,并将前一幅图像的右半幅与后一幅图像的左半幅进行拼接。这样用循环将所有图像全部遍历,找到每两幅图像的佳匹配位置,即可得到没有重复部分连续的流动画面。
3图像预处理
3.1真彩色转换为灰度图
真彩色图中包含多达224种颜色,难于实施对比,所以通常将其转为灰度图。将真彩色图灰度化有许多方法,其中比较常用的方法有平均值法、大值法、加权法和单色法。平均值法,就是将图像的R、G、B值求平均,然后将平均值作为灰度图的灰度值;大值法,就是求像素R、G、B值的大值,将其大值作为灰度图的灰度值;单色值法,就是将图像的R、G、B值的任何一个值作为灰度图的灰度值。
自然界中的所有颜色都可以由红(R)绿(G)蓝(B)三原色组合而成,RGB色彩系统是通过将R、G、B这3种颜色相加产生其它颜色,是常用的颜色系统。YUV是被欧洲电视系统采用的一种颜色编码方法(属于PAL)。其中“Y”表示明亮度(luminance或Luma),即灰度值;而“U”和“V”表示的则是色度(ChrominanceChroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。“亮度”是通过RGB输入信号来创建的,方法是将RGB信号的特定部分叠加到一起。YUV与RGB之间有着如下对应关系:0.229-0.1480.615[Y,U,V]=[R,G,B]0.587-0.289-0.5150.1140.437-0.100由于Y代表了图像的灰度值,所以用Y分量能够表示出像素点的灰度值即:Y=R×0.299+G×0.587+B×0.114由上式,根据图像的R、G、B值求出Y值,然后将像素点的R、G、B值都赋值成Y,就能将真彩色图转换成灰度图。图4为运用此法转换成的灰度图。
图4真彩色转换为灰度图
3.2图像平滑
图像平滑主要是为了消除噪声。噪声并不限于人眼所能看得见的失真和变形,有些噪声只有在进行图像处理时才可以发现。为了去除噪声,有必要对图像进行平滑,可以采用低通滤波的方法去除高频干扰。图像平滑包括空域法和频域法两大类,在空域法中,图像平滑的常用方法是采用胶球清洗自动监测装置的研究367值滤波或中值滤波。
针对水流中胶球图像的特点,本文采用了均值滤波,它是用一个有奇数点的滑动窗口矩阵在图像上滑动,将窗口中心点对应的图像像素点的灰度值用窗口内的各个点的灰度值的平均值代替。即:假定一幅1×1个像素的图像f(x,y),平滑处理后得到一幅图像g(x,y),g(x,y)由下式决定:σ0(t)=σ1(t)=为两类样本的方差;ti[i-μ0(t)]2h(i)p0(t)maxi[i-μ1(t)]2h(i)p1(t)(m,Sf(m,n)其中,x,y=0,1,2,…l-1;S是(x,y)点邻域中点的坐标的集合;M是集合内坐标的总数。上式说明,平滑化的图像g(x,y)中的每个像素的灰度值均由包含在(x,y)的预定邻域中的f(x,y)的几个像素的灰度值的平均值来确定。本文采用的是一个3×3的邻域窗口。
另外,要注意一点,在用窗口扫描图像过程中,对于图像的4个边缘的像素点,进行了另外处理,否则,边界噪声也会对实验结果造成较大影响。平滑结果如图5所示。
图5图像平滑结果
基于小误差分割法的灰度图二值化变换灰度图的二值化变换就是将一幅灰度图转换成黑白二值图像。具体方法是先指定一个阈值,如果图像中某像素的灰度值小于该阈值,则该像素的灰度值设置为0(黑),否则设为255(白)。变换函数表达式如下(x<T)(x≥T)其中,T为指定的阈值。阈值选取是图像处理中的基本问题,直接影响图像目标识别和跟踪的重要课题之一。国内外学者针对这一课题进行了广泛深入的研究,提出很多阈值选取方法。其中小误差法,受目标大小和噪声影响小,对小目标图像仍具有好的分割效果,是一种理论严密、效果佳的阈值选取方法。
本文根据胶球图像的特点,采用了小误差分割算法进行梯度图像分割。用小误差法求取佳阈值的计算公式如下:J(t)=1+2×[p0(t)lnσ0(t)+p1(t)lnσ1(t)]-2×[p0(t)lnp0(t)+p1(t)lnp1(t)]上式为计算图像佳分割阈值的判断准则函数,它表示了小错误分割概率的问题。其中:p0(t)=ih(i),p1(t)=ih(i)为两类的样本总数;μ0(t)=i・i,μ1(t)=为两类样本的分布均值。其中,min为图像中小灰度值,max为大灰度值。通过循环计算每个t值对应的J(t),从中找出J(t)小值对应的t,即为分割的佳阈值。t3=ArgminJ(t)(对于256级灰度图,l=255)i∈{0,1,…,l}由图6两种处理结果可知:采用小误差分割算法获得的二值化图像效果更好。
图6图像分割后的二值化图像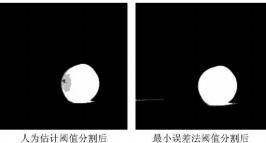
5胶球位置定位
众所周知,光照条件对图像处理结果有着至关重要的影响。鉴于此,本胶球清洗装置在封闭管道内侧不同角度配置有一定数量的频闪灯,这有效地避免了光照不稳定、不均匀现象以及图像中阴影的出现。在得到分割后的二值化图像的基础上,采用水平/垂直投影变换即可实现胶球的边界定位。而所谓水平/垂直投影变换就是将图像的某行(或某列)投影到水平(垂直)轴,将该行(列)的黑点(或白点)数目累加起来。这里根据需要,将每一列像素的黑点数相累加得到图像在水平方向上黑像素点的分布函数,根据黑像素点的分布,来确定胶球的上下边界和左右边界,从而获得胶球的数量以及半径。定位结果如图7所示。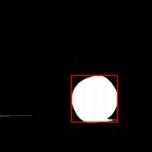
图7胶球位置终定位结果
